








研究人员展示了两年来实施和测试新型喷气式人形机器人的工作成果。
印度理工学院/Youtube
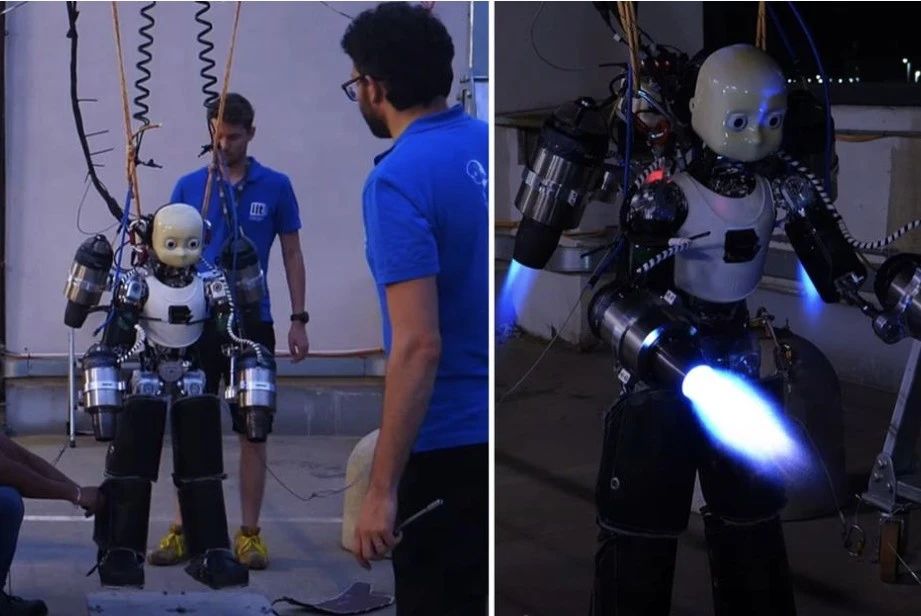
印度理工学院 (IIT) 的机器人专家对世界上第一个喷气式人形机器人的实验区域进行了预览并进行了初步验证。
这个名为 iRonCub 的人形机器人配备了四台紧凑型喷气发动机,使其能够飞行并执行高级任务。
研究人员认为,飞行能力可能使这些机器人在某些特定应用领域受益,包括救灾,因为对于人形机器人来说,这目前是一个未知的研究领域。
自2021 年启动实验以来,印度理工学院 (IIT) 的团队在测试过程中遇到了挑战,因为他们必须努力防止机器人因发动机排气而起火甚至爆炸。
01下一代机器人
该团队已经开发了基于iCub v2.5 和v3.0平台的iRonCub原型。iCub是由 IIT 创建的研究级人形机器人,旨在帮助开发和测试具身AI算法。
iCub有53个自由度,每只手有9个自由度,大部分自由度在上半身。它配备了全身皮肤、力/扭矩传感器、摄像头、麦克风、陀螺仪、加速度计和每个关节中的编码器。
再来看看 iRonCub,两个版本都配备了四个喷气发动机——两个安装在手臂上,两个安装在机器人背部的喷气背包上。目前的实验集中在iRonCub版本3 上。
为了适应外部发动机,iCub的硬件设计进行了重大修改,包括创建新的钛脊柱和添加耐热盖以提供保护。
配备喷气发动机的iRonCub3重约154磅(70公斤),涡轮机最大推力超过1000N,排气温度可超过600摄氏度。
该团队目前正在新开发的飞行和控制区域测试 iRonCub3,与 iRonCub2相比取得了重大进展。iRonCub3在其前身的基础上进行了多项改进。
该版本基于iCub3平台构建,移除了肌腱,并在喷气背包中集成了力矩传感器。此外还设计了新的电子设备,控制系统和规划器现已成为新一代,运行频率更高。
据研究人员称,这些改进共同增强了机器人的能力和性能。
02人形飞行控制
空中人形机器人的一个关键挑战是规划飞行和行走的轨迹,包括它们之间的过渡。
为了解决这个问题,在Python中开发了一种基于动量的轨迹规划算法,使用直接多重射击方法。该规划器已通过模拟验证,并将很快在实际机器人上进行测试。
对于飞行控制,设计了算法来管理机器人的姿态和位置,采用约束二次规划优化。据研究人员称,该框架可适应不同数量的喷气涡轮机,并确保符合物理约束。
该团队声称,这项研究的复杂性远远超出了传统人形机器人的挑战。热力学起着至关重要的作用,涡轮机废气温度高达 800 摄氏度左右,速度接近音速。多体系统的空气动力学需要具有物理信息组件的神经网络进行实时评估。
控制器设置必须集成高带宽和低带宽执行器,包括关节和涡轮机。规划器的任务是生成电机动力学和涡轮机的轨迹。
研究人员声称,实验验证至关重要且危险,几乎没有任何改进的余地。